
This topic will try to sum up my work related to robotics, and provide as much pictures an videos as possible for those of you interested in this subject.
Perseus 1, 2005-06-29
General:I’ve worked on this one for about 2 months, with lots of interruptions and having only little continuous work time.
It was my university graduation project and major research work was on artificial vision.
Platform: modified RC truck, with servo controlled direction on front wheels, and geared (weak) motor on back wheels for propulsion.
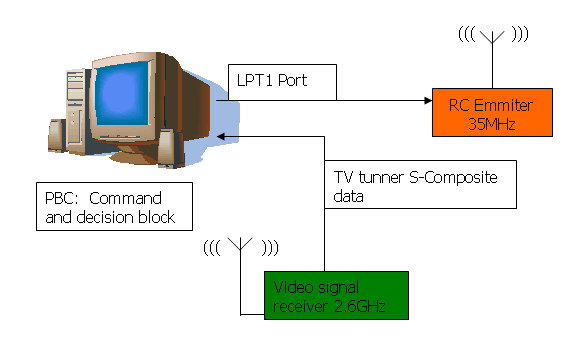
Hardware: video camera, powered on 2 AA batteries, 2.6GHz video transceiver powered on 8xAA batteries, original car 35MHz RC control board connected to car’s motors running on 4xAA batteries, remote PC running custom image processing software, that I’ve created at that time.
Block Schematics:


Functionality:
The performance was very good, the robot being capable of recognizing and following a laser spot projected in front of it (in the camera’s view port).
Here are a few pictures of the robot vision itself:




Pictures




Resources:
Front cover of my license work: cover.pdf
Snapshot of desktop application:












Perseus 2, 2007-12-04
General: in an attempt of continuing the perseus 1 project, the first improvement I’ve tried was to eliminate the need for a remote computer
Platform:
modified RC truck, with servo controlled direction on front wheels, and geared (weak) motor on back wheels for propulsion.
Hardware:
Mini ITX D201GLY2 motherboard with 1.3GHz Celeron CPU, 512MB RAM, IDE2CF and CF2SDCard adaptors for a 2GB SDCard based DOC (disk on chip), M2-ATX DC-DC PC power supply 160W, 4×8 AA rechargeable batteries connected for 10.4V @ 10.4Ah .
Block Schematics:
Functionality:
This design was a failure. The heavy batteries overloaded the motors, and the original H Bridge circuit transistors vaporized. The platform is too weak for the robot’s mass.
Additional problems: motherboard resets when motors are triggered since there is only one common power source. Some high capacitors or separate power sources would have solved this.
project was abandoned – seeking for a better platform.
Pictures













TwinMotion 1, 2009-03-01
General: Since I needed a stronger platform, but didn’t want to spend 300-400$ on commercial offers, I’ve built my own, strong, customizable robot platform FROM SCRATCH!
Platform: Big 28 cm diameter light wooden wheels, two geared (30rpm) strong motors , some metal pieces and screws. To fix the wheels on the motor-heads, I’ve created a custom bearing, out of some tick small diameter metal pipe.



Hardware: Robot “brain” under development, currently I’ve used it with my AtMega8 H-Bridged board, available here.
Block Schematics: Not yet available.
Functionality: Not yet available.
Pictures and videos

This video shows the platform in action, controlled by a simple ATMega8 microcontroller brain, that was only giving simple movement commands : forward x cm, turn left, move backwards x cm, turn left/right, etc.





TwinMotion update #1, 2009-03-22
General: Wheels needed better adjustment on motor axis, and I’ve decided to add a third wheel for stability, since running on two wheel can make the fixed-body turn upside down – and would create problems when using various environment sensors.
Platform:
A third wheel has been added.
Hardware: Currently the experimental setup is running on the same Atmega8 board.
Pictures and videos
Here’s a demo showing this platform, you can easily see how powerful it is, considering the complete setup is ~2 Kg weight.
To be continued…
Radu Motisan

Pingback: PocketMagic » Another differential robot platform
man, esti fantastic. progresul omenirii se datoreaza celor ca tine. in particular imi bat capul sa inteleg cum functioneaza atmega8 🙂 bafta in continuare, o sa-ti urmaresc progresele
Sorin, multumesc de incurajare, din pacate sunt simple jucarii si nimic revolutionar. De asemenea am intampinate multe bariere la partea de software, autonomia unui astfel de robot e greu de realizat.
Daca pot sa te ajut cu atmega8, sa spui ce te intereseaza. Am pus un pos cu primii pasi aici:
http://www.pocketmagic.net/?p=375
Sunt atasate tool-urile si o schema de programator f simpla.
Thank you very much for this article. Im interested in this.
Pingback: Cartoon yourself using Leptonica « PocketMagic