
In this post I will show the first bot i have ever made and first of all sorry if you detect bad grammar, English is not my native language.
As the first approach of a bot it needs lot of improvements that I will cover in another post after I made the changes.
At the moment bot was made quickly and with not all the care for a permanent device, what will be done in the next step.
The main body of the bot is made out of wood material. Despite of most people dont like to use wood in robotic projects I think it have great potential and some issues also:
Good points about wood as working material:
-
Easy of handle: It´s easy to modeling in wood. You have more ways to design parts using wood than metal.
-
Weight: It´s light
-
Price: It´s cheaper
-
Some desired physical
characteristics: Almost no deformation by heat and good mechanical
resistance for small prototypes.
Bad points about wood as working material:
-
It don’t like humidity, can deformate or being weak in mechanical resistance
-
Can be degradated along the years: Environmental action, bugs and microbiotics may want to eat the wood.
The intention of this post is to show
the concept of the bot and it´s first action.
Bot is made of the parts:
-
Two DC motors saved from discarded CD Drives. I discovered that this little motor have good force at
low voltages. In my setup the motors are a bit overloaded and I will provide them heatsinks for the next version. Using 8 volts to feed the motors but I think they are rated to 5 volts probably, but not sure. -
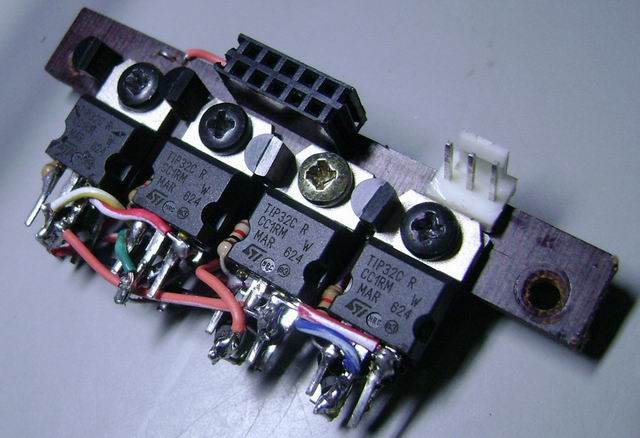
An H-bridge. Thanks to Radu for sharing his detailed H-Bridge scheme: http://www.pocketmagic.net/?p=508, that i used to made a compact style of H-Bridge that I called as “Sandubridge”, a sandwich of an bridge. Details of mine H-Bridge assembly:
 |
 |
-
Reduction pool: I don’t have any reduction gearbox near me on my city and they are expensive. This way a reduction scheme was made out of improvision, using two pulleys saved from an old printer and transmission made of insulating tape, cut, folded and fixed extremes with cianocrilate glue. In my country these materials are almost imported and in here the gov taxes about 80% upon the initial price even for educational material and this is a hole different disgusting
subject. -
Battery pack: Made out of metal tubes, not good because they are heavy. Will be changed for the next
version. -
Atmega8 controller mounted on a Arduino Serverino board. Arduino home: http://www.arduino.cc
-
The controller software: Programmed on Arduino IDE, very simple “sketch” to just test the bot.

On the above image we can see the general aspect of the bot, lot of hot glue were used on this first version.
Click to enlarge.
The next video show the bot performing it´s movements. It´s centered weight.
For the next time i pretend to post
more valuable information as how to work with wood for a good permanent solution
regarding mechanical parts among other aspects.
I will try for the next assembly:
-
Sound sensor. So we can interact with the bot making it start/stop and possibly determining movement patterns.
-
Edge sensors. Simple contact sensors to detect obstacles.
- Atmega8 mounted with minimal components.
- Get rid of the metal tubes and use proper battery case.
-
I expect lot less friction for the next setup what will ends with it spinning faster. If it´s good enough
I will include some POV device for fun.
Rodrigo Nascimento Hernandez


Rodrigo, it is a great device and you must not stop your job, because you are very talented!
So nice, really