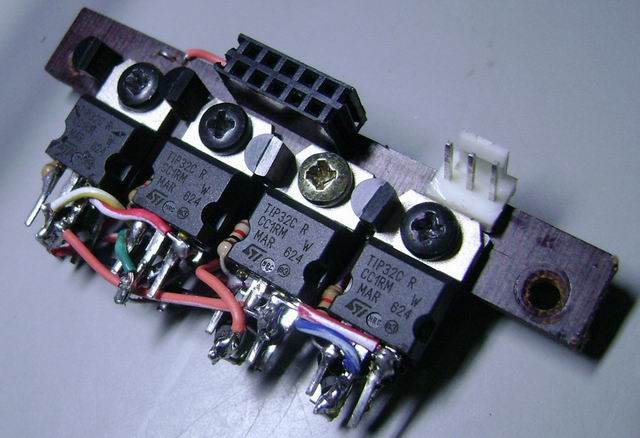
Dual H-Bridge for controlling two motors
Build a dual H-bridge board to control two motors.
Build a dual H-bridge board to control two motors.

Building an autonomous robot using a rover platform and advanced electronics is not an easy job. Kevin asked me to build a robot that would follow its user. A companion, very much like a robo-dog. See the project log here.
Learn to connect a bluetooth module to an ATMega micro controller via the UART serial interface and even further, discover it using a bluetooth enabled Android phone. The 9600bps serial link established, can than be used to exchange data: read sensors or control the robot.
An article about a differential Arduino robot by Rodrigo Nascimento Hernandez

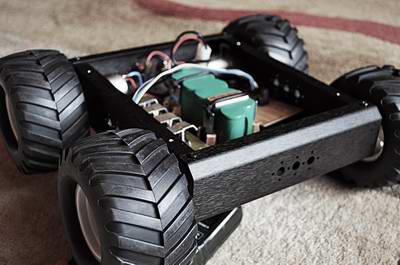
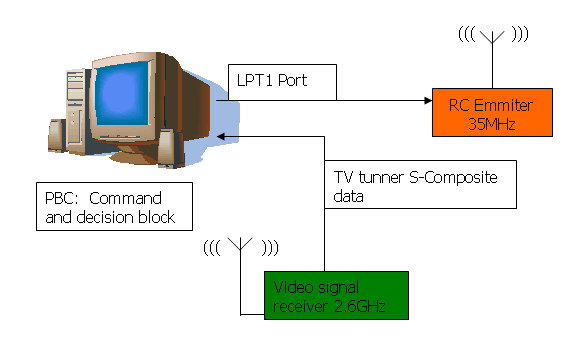
Perseus 3, a 4×4 advanced robot featuring an Atmega8 for sensor interfacing and motor control, and a I-mate SP5 smartphone (200MHz) running Windows Mobile 6.0 as robot’s brain. Small weight, powerful trust, and lots of features including WLAN, Bluetooth, Camera, Speaker, Phone-interface (GPRS, 3G), Microphone (for voice commands) and more.

A new differential robot platform, with strong gear motors and low power consumption.
A not-so-short article on various robot platforms I’ve experimented with. See my latest designs, and learn about my findings on robotics.